ES 51 Robot - First Semester Mech E Class Project
My freshman fall semester, I took ES51 (Intro to Computer-Aided Design and Manufacturing). The class was a hands-on sprint through CAD, technical drawings, fabrication, and iterative prototyping, ending with a team-built robot designed to compete in an end-of-semester game.
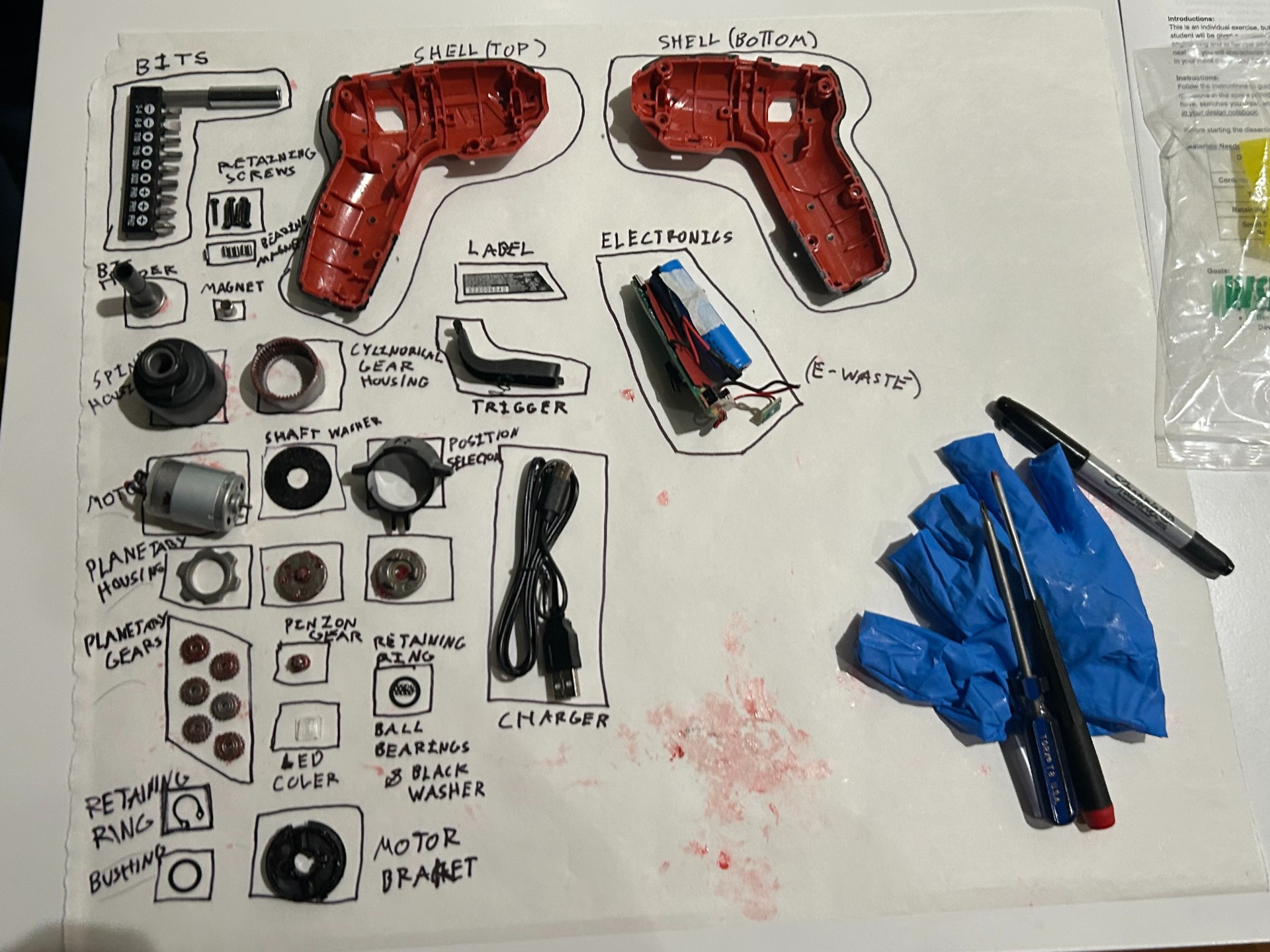
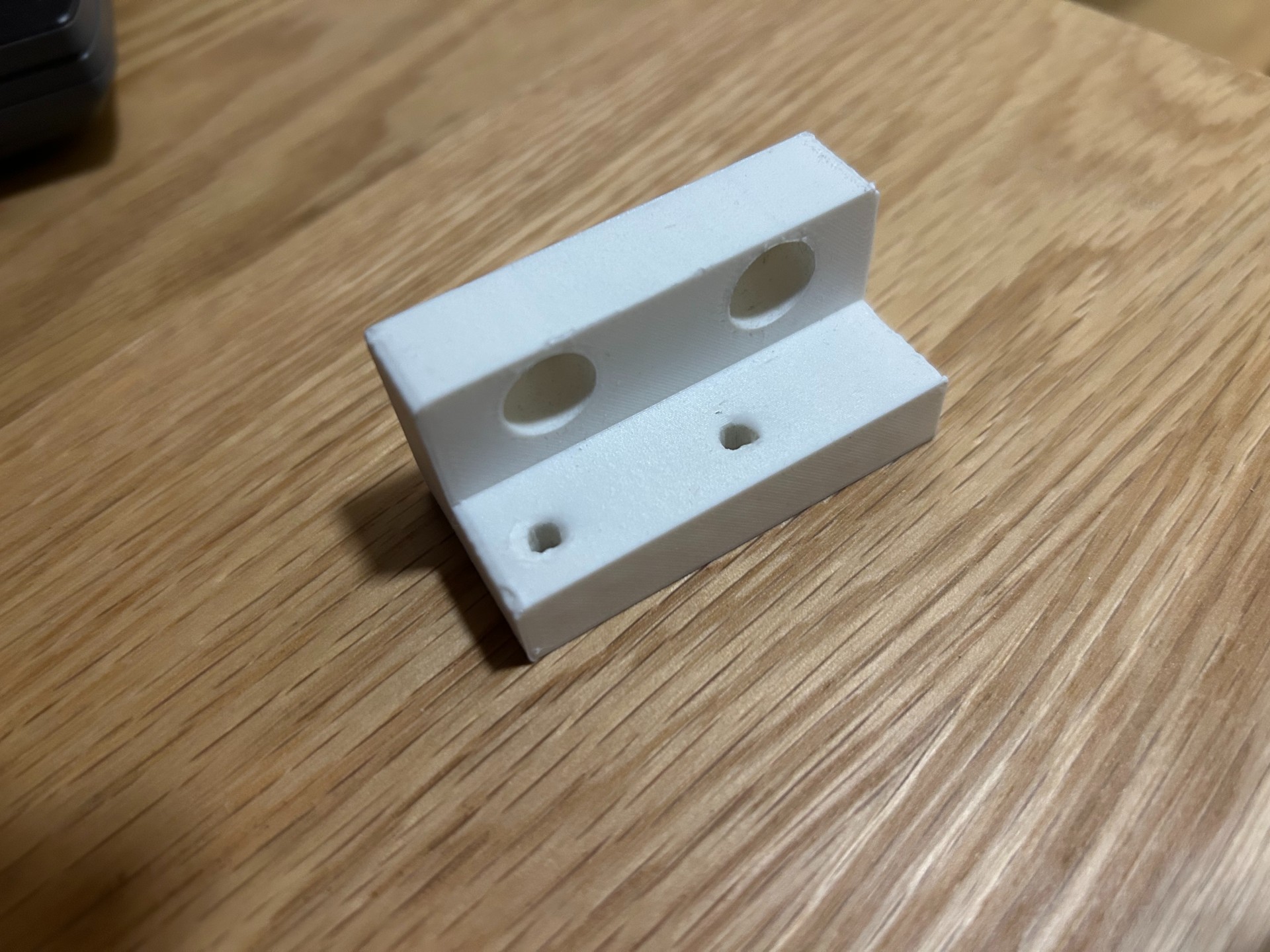
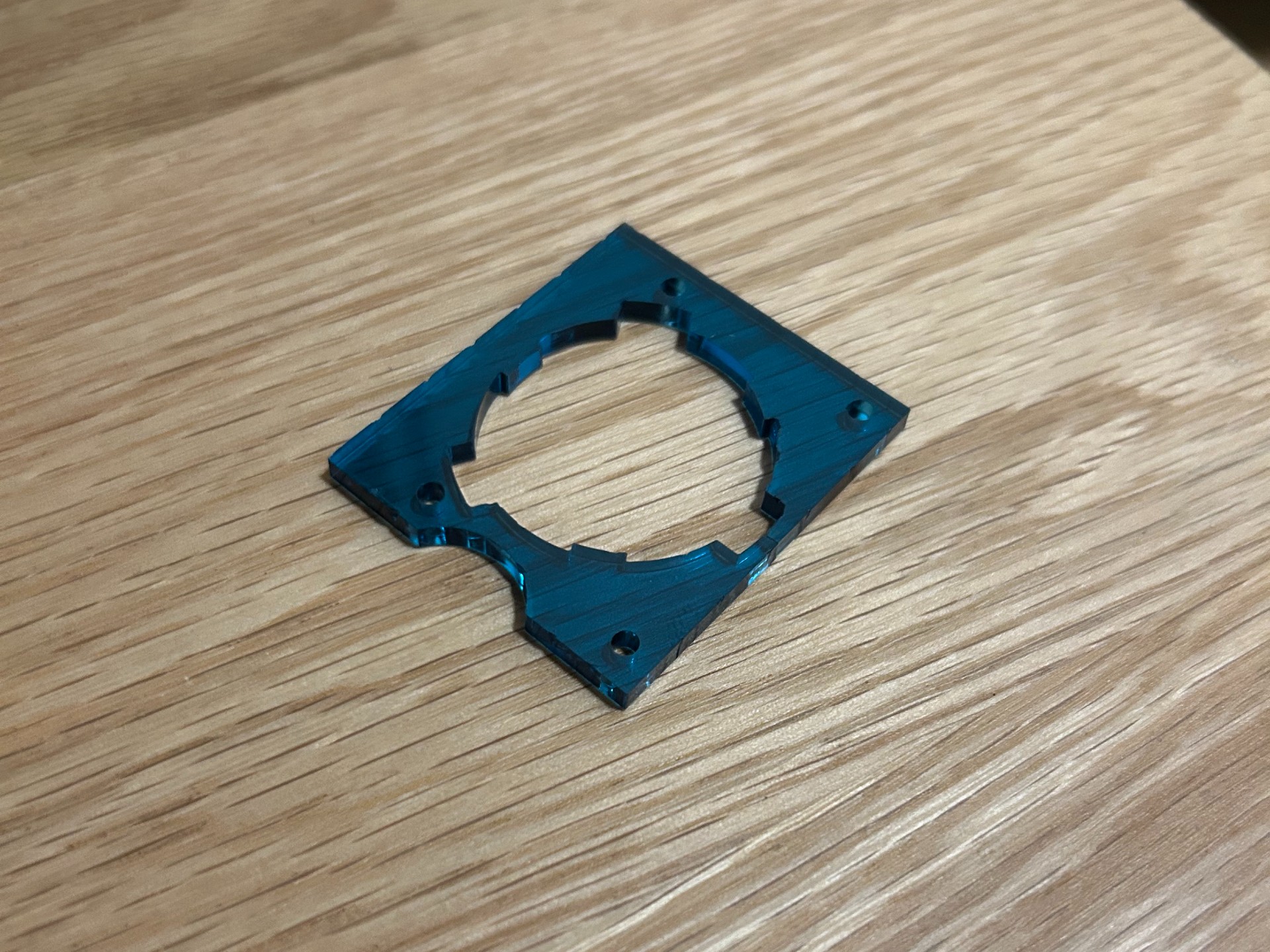
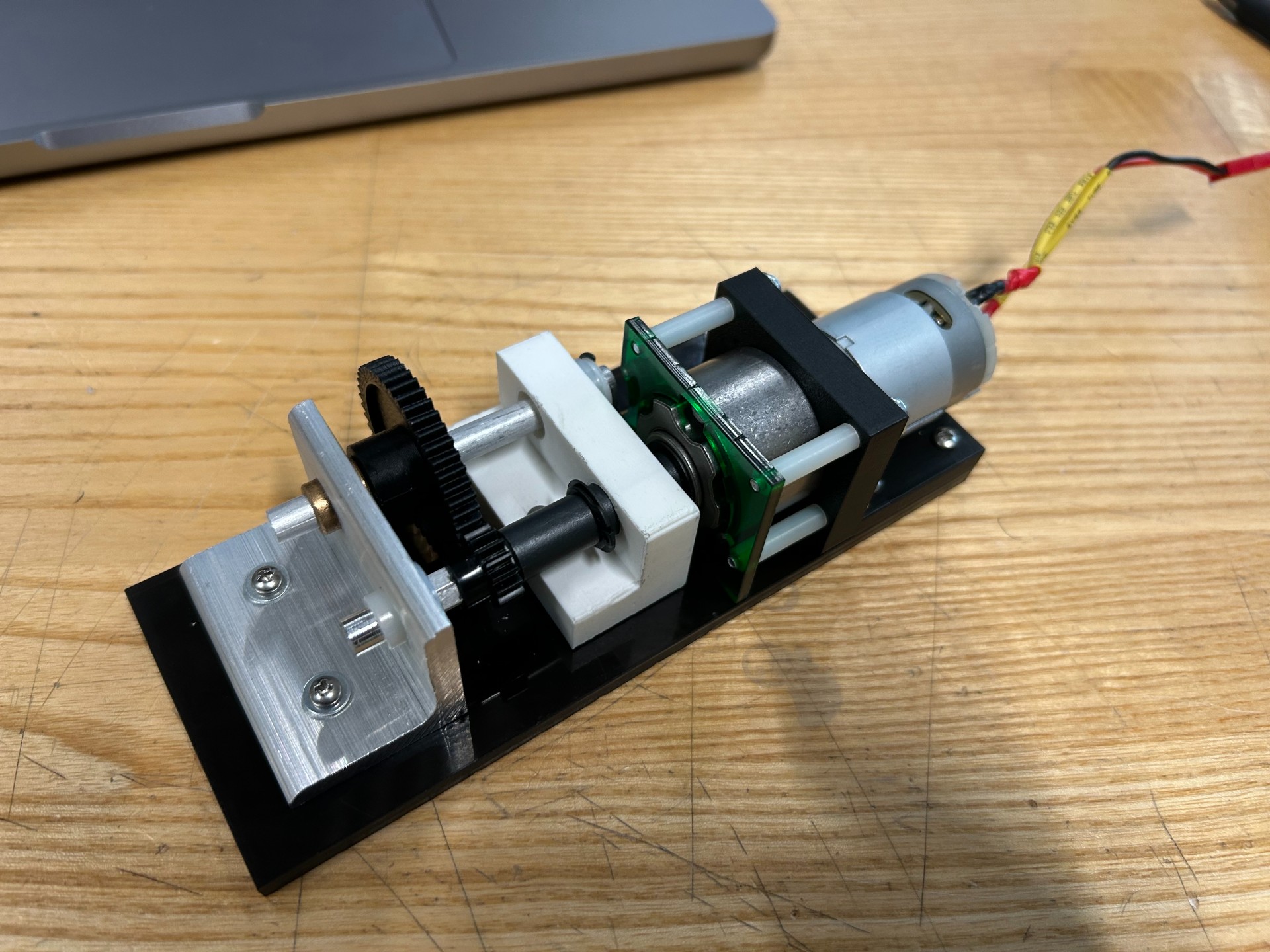
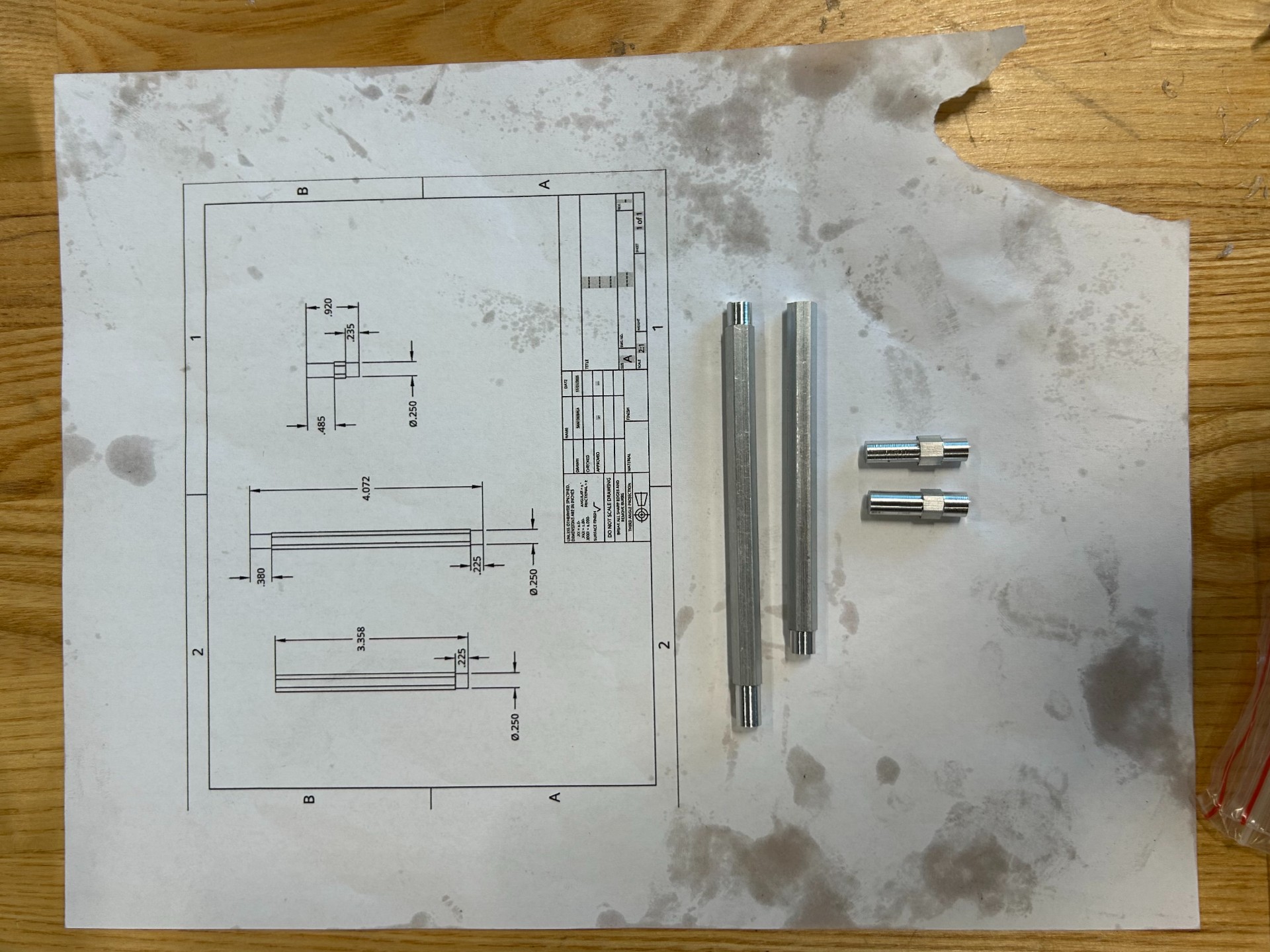
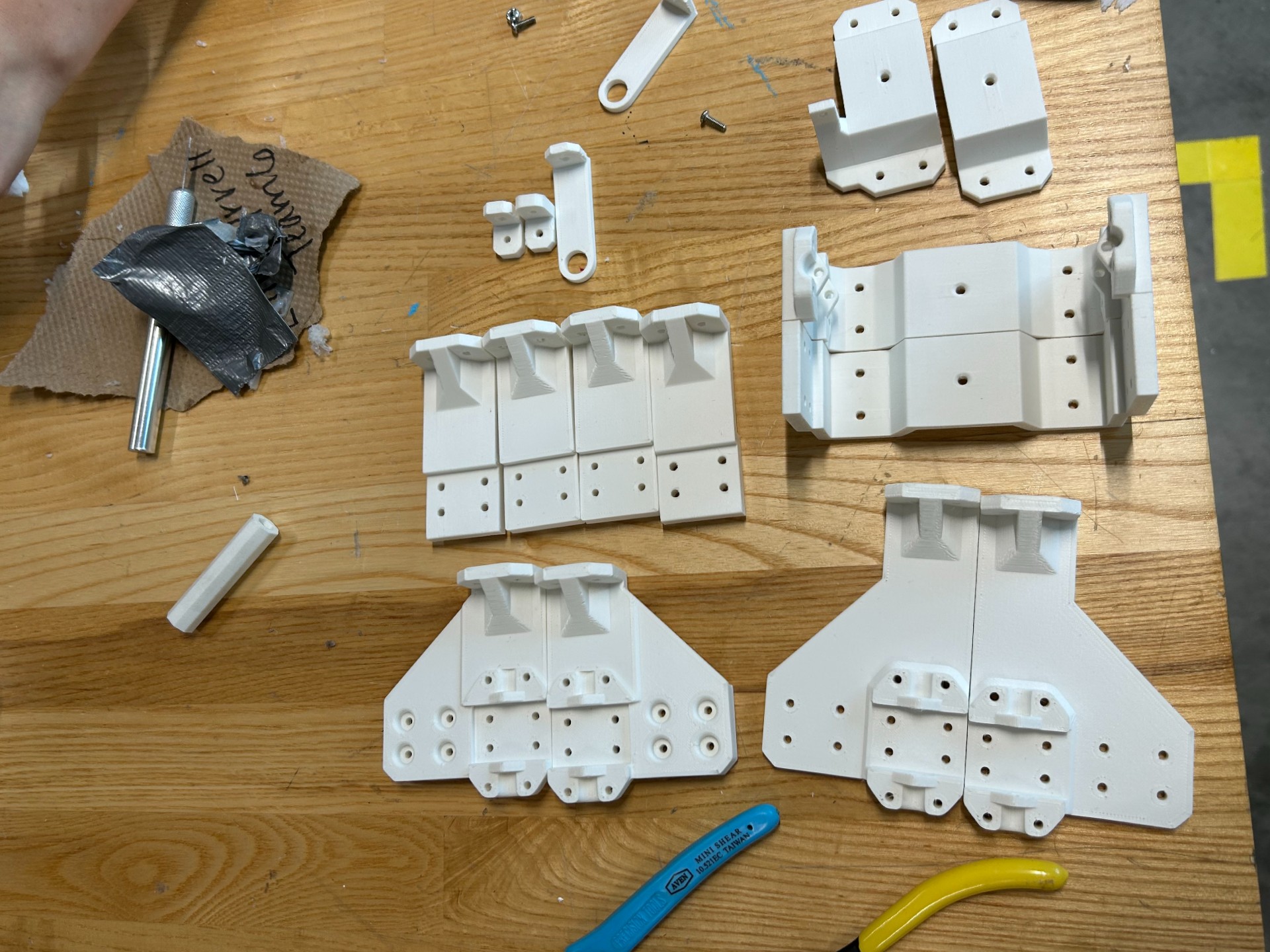
We started by disassembling and labeling small hand-held drills to source parts for our robots. We then manufactured the components for a small gearbox using the drill motors and technical drawings. Along the way, we 3D printed supports, turned axles on the lathe, and laser cut mounting plates as an introduction to machines in the shop as well. Below are some pictures of the parts we made along with the final gearbox:


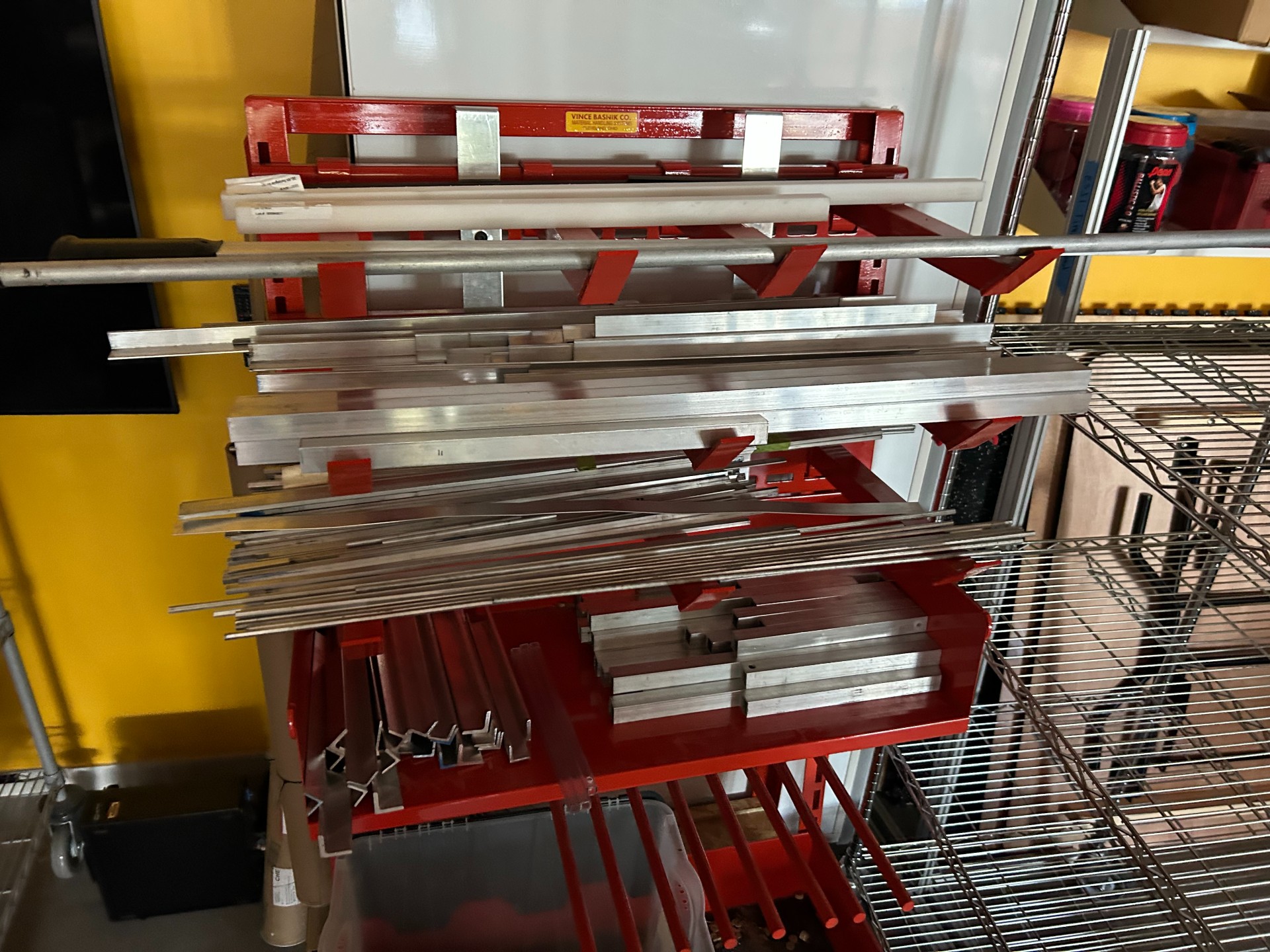
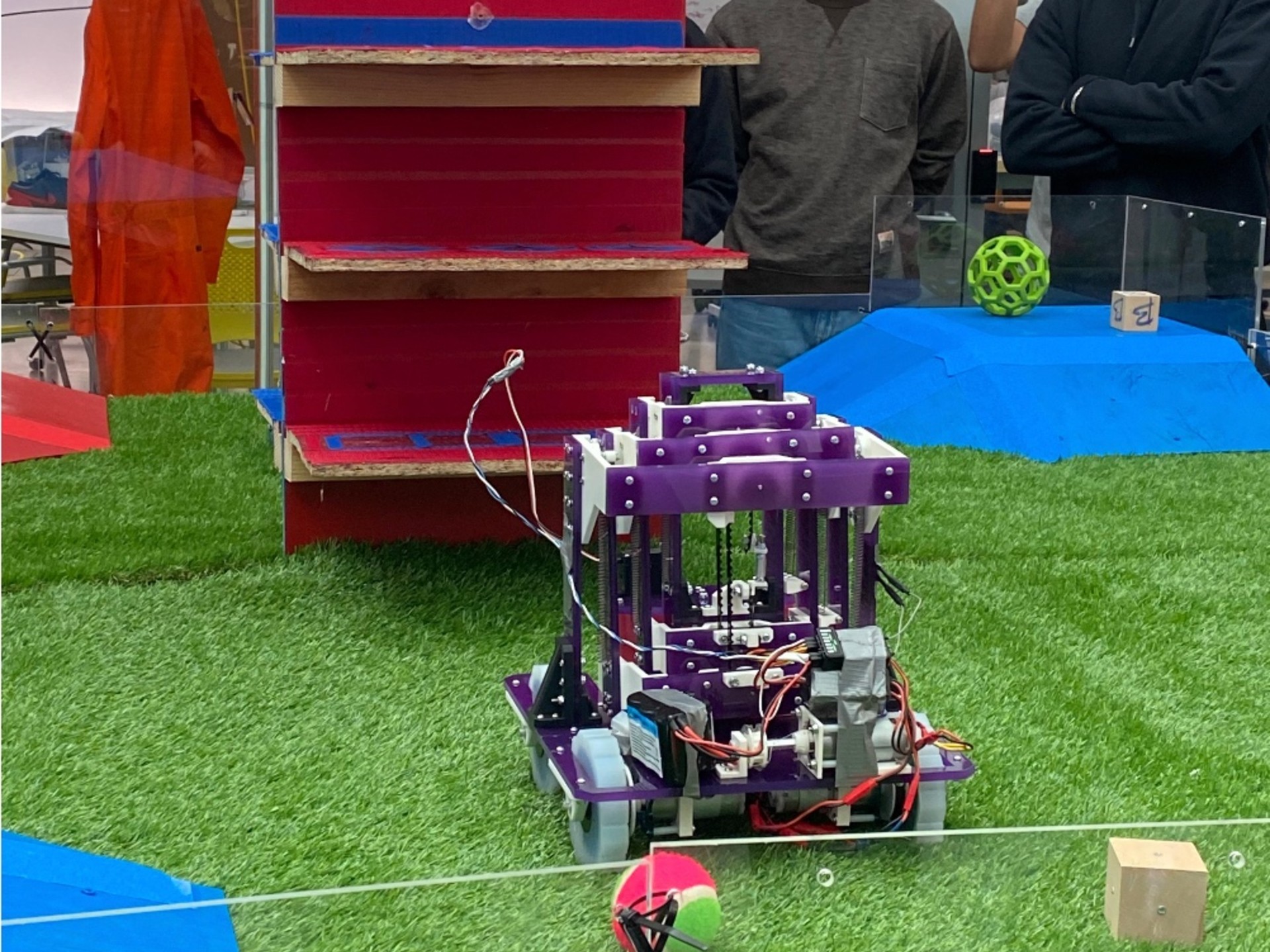
The final project for the class was to build a robot completely from scratch in teams to compete in a small competition at the end of the semester called “Turf Wars”. This semester, the challenge for turf wars was to pick up and place small objects (a tennis ball, a cube, and dog toy) on different levels of a shelf. Below are some images of the game field along with some of the parts and materials we had access to for constructing our robots.





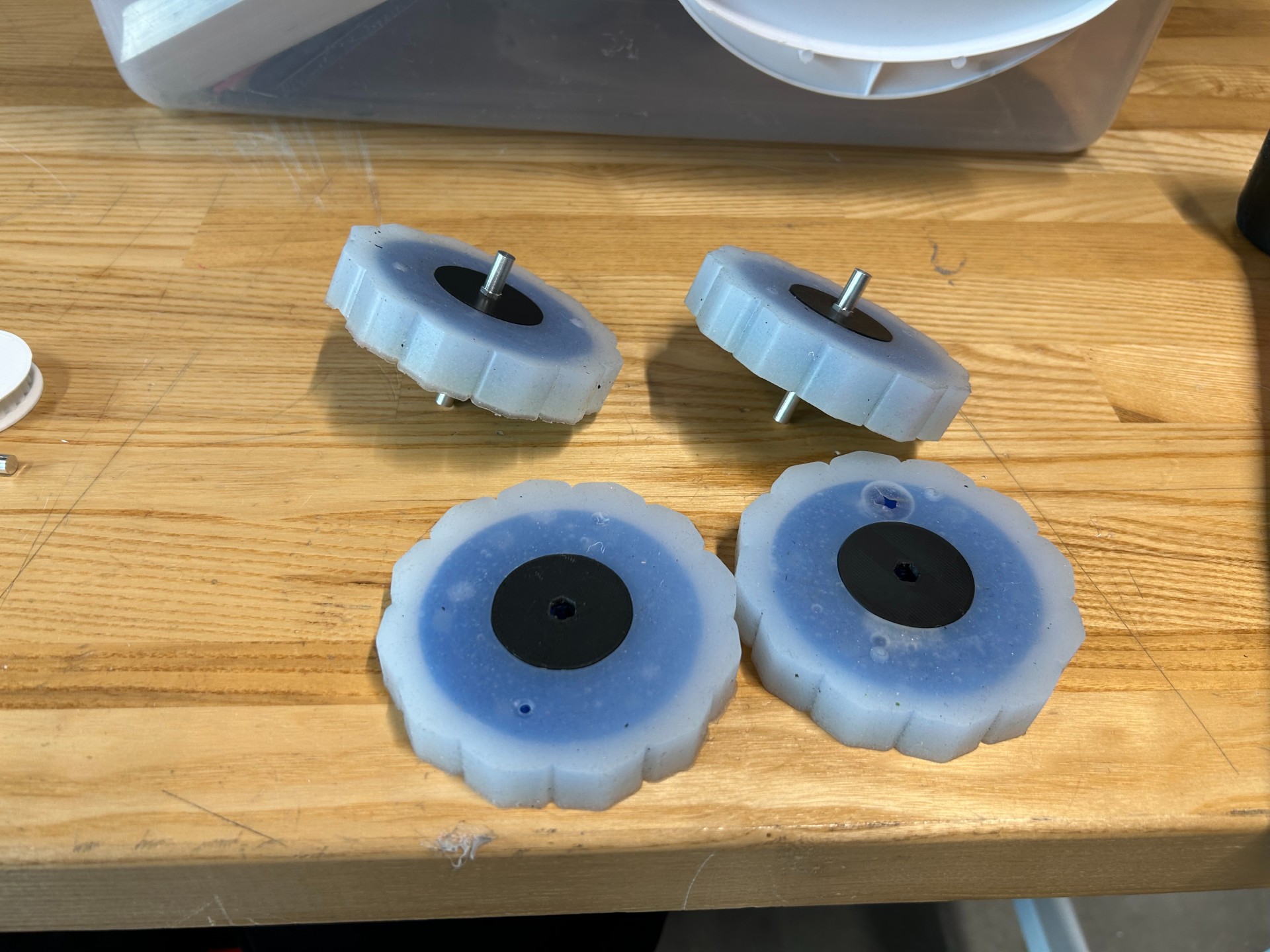
We then got an introduction to the CNC’s in the shop and cut out molds for silicone wheels out of wax blocks. From this we were able to use the drill motors and axle’s we previously turned to make a small cardboard prototype of the robot we planned to build.



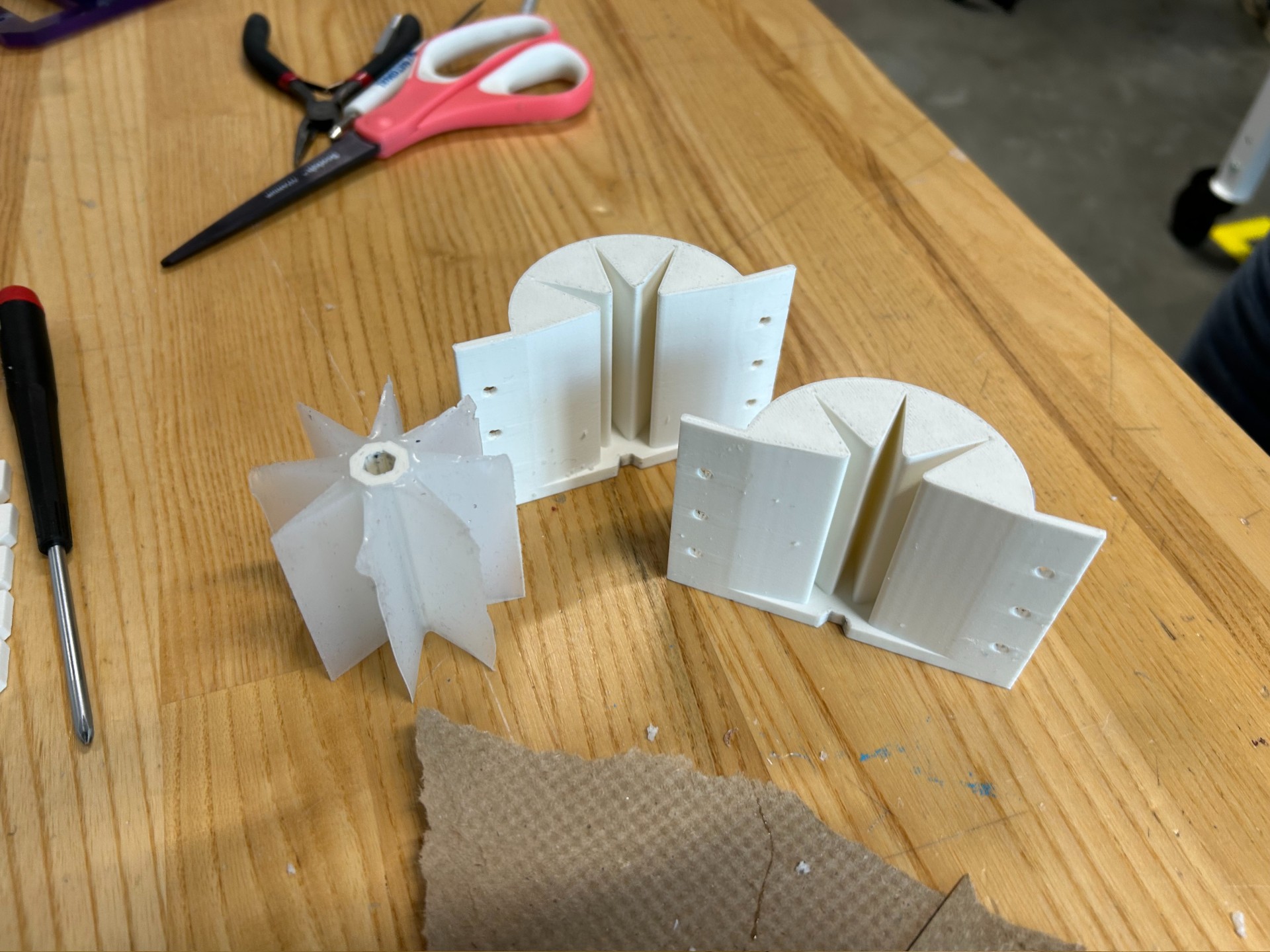
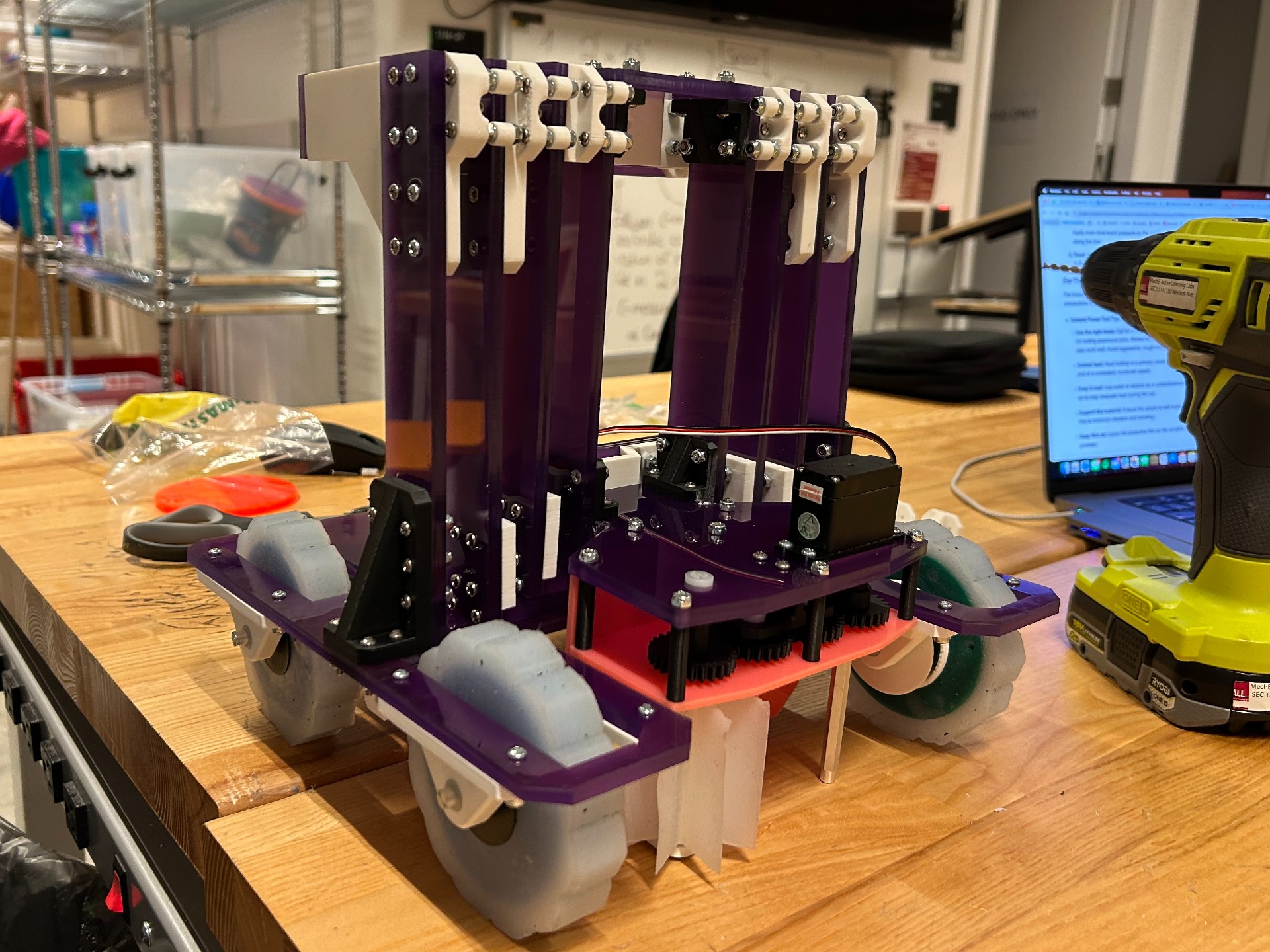
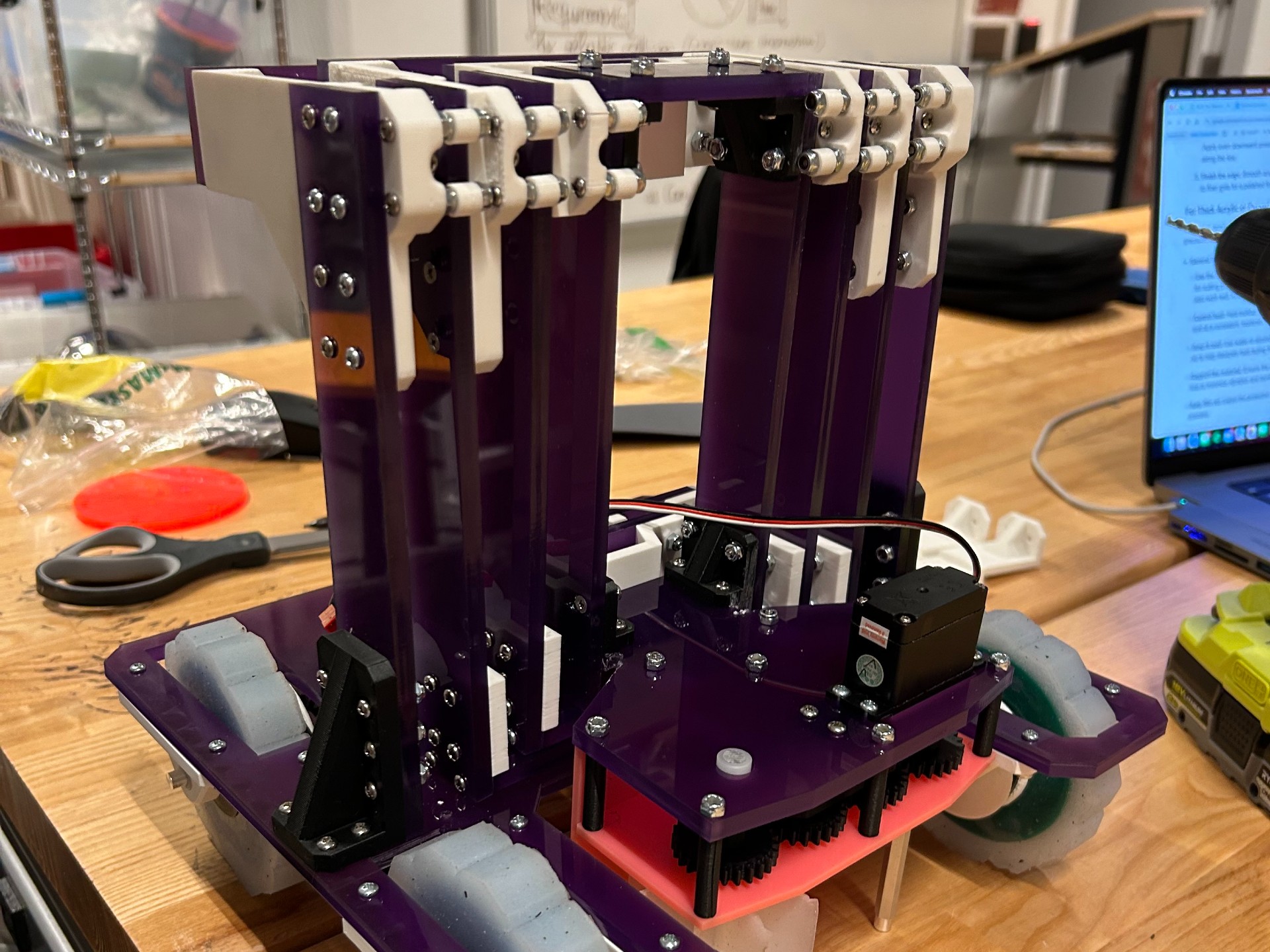
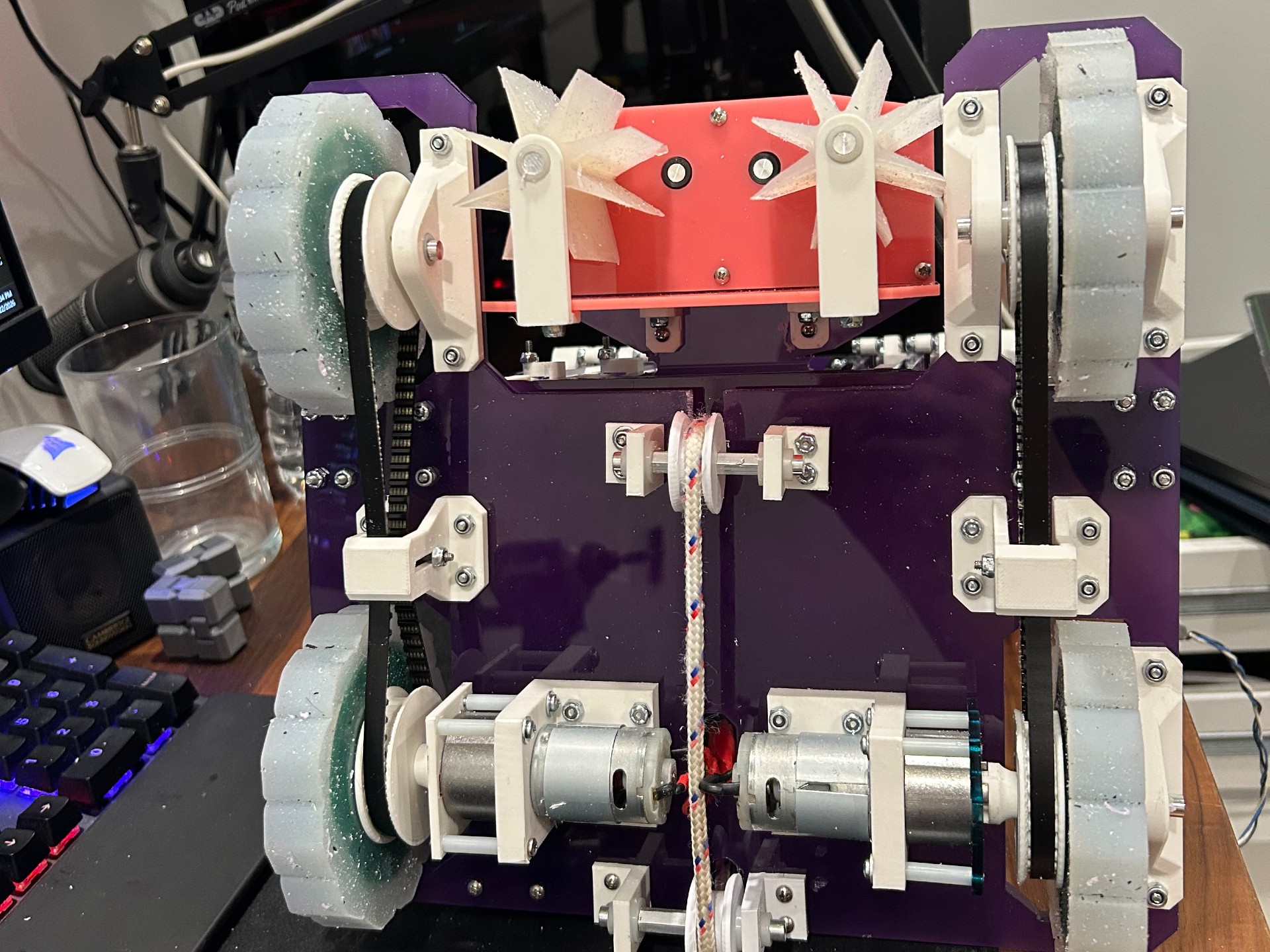
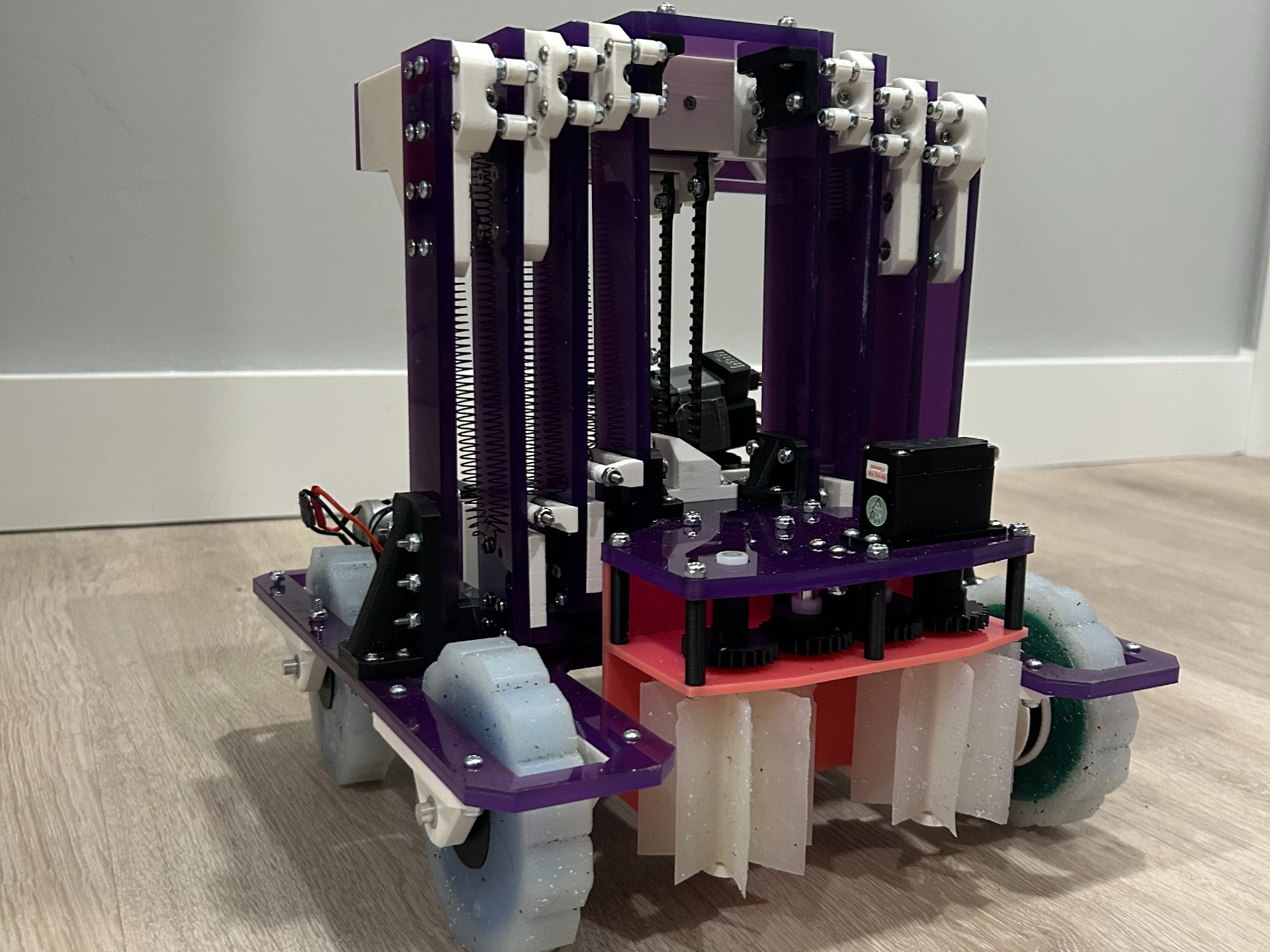
Once we had all necessary experience on the machines in the shop we were free to build our robots for turf wars. I was responsible for most of the design for my team's robot and I started with the intake. We decided to prioritize the tennis ball and cube game pieces since they were meant to go on to the lower two levels. I designed a soft-robotics intake mechanism that used compliant star wheels. We molded the wheels out of silicone molds we 3d printed and fashioned them to the intake plate using a mixture of 3d printed standoffs and acrylic plates. We turned axles for these rollers as well and 3d printed an appropriate opposite rotation gear train so the wheels would index game pieces between them and into/up against a back support plate.
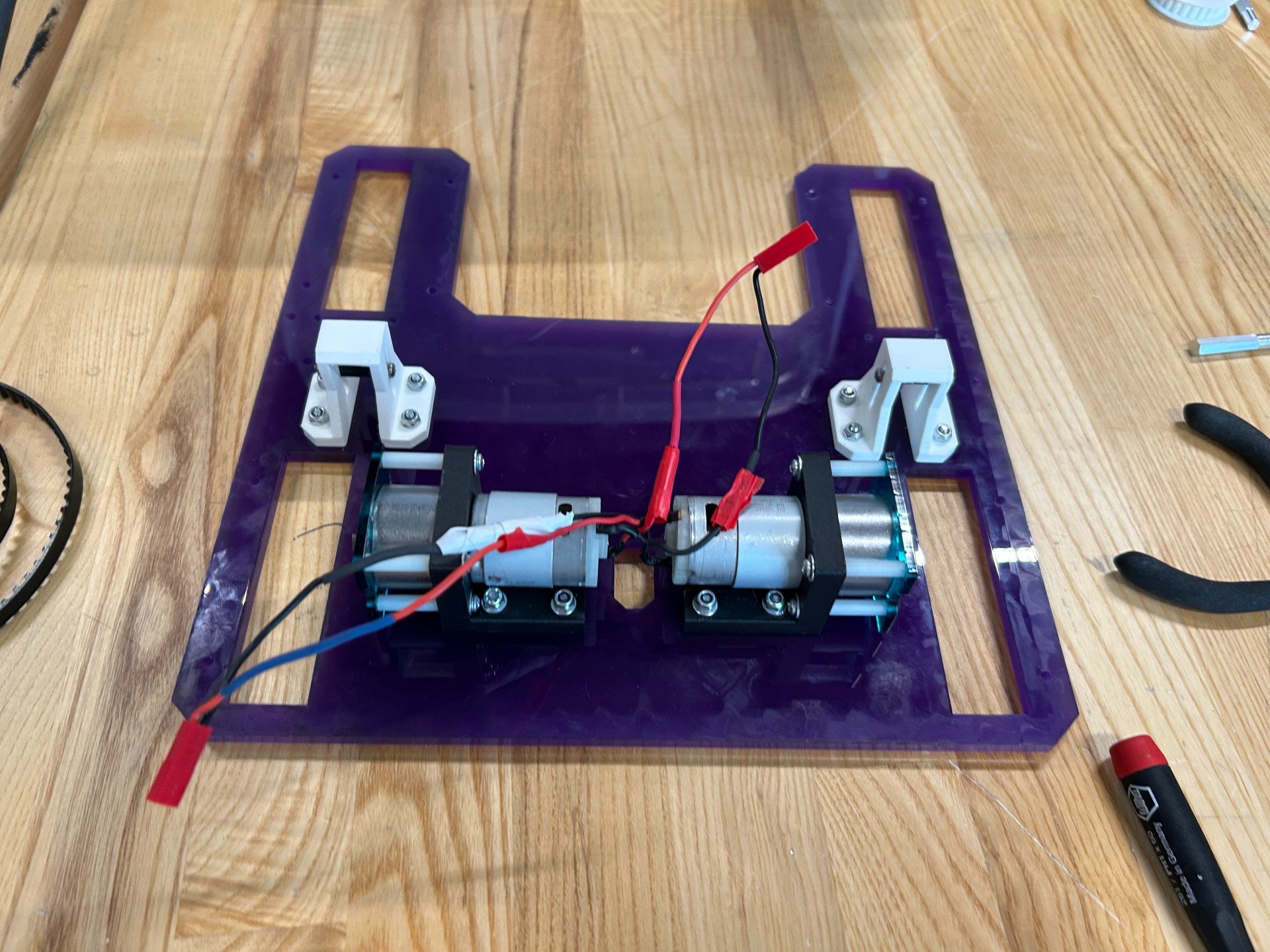
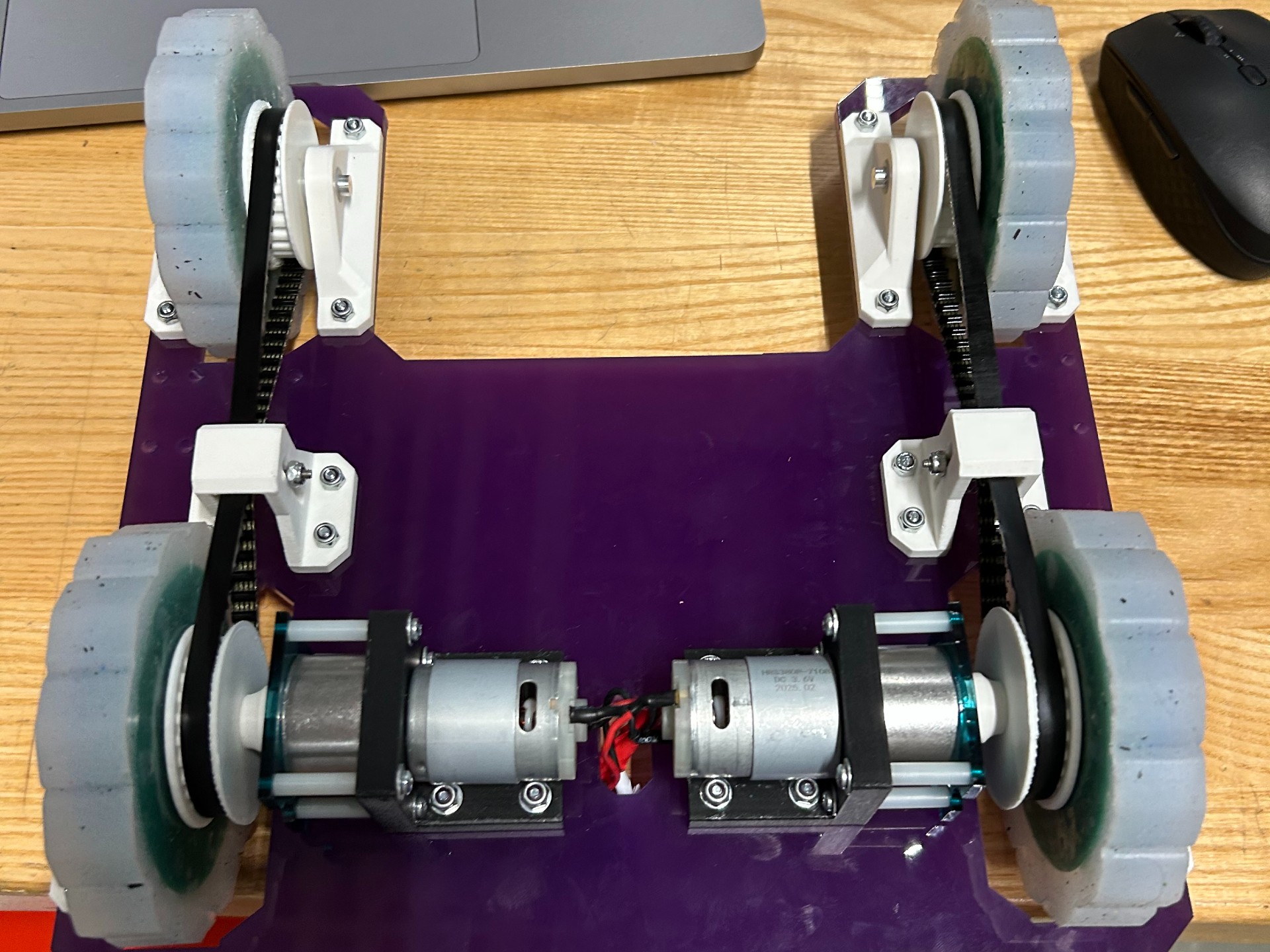
I then moved on to the drive base. The main structure of the robot was all built off one baseplate where all the drivetrain parts were fastened to. We laser cut 1/4” and 1/8” acrylic for this, using the motors we sourced from the hand drills, along with a 3d-printed pulley and belt driven power train that was adjusted using a custom tensioner.
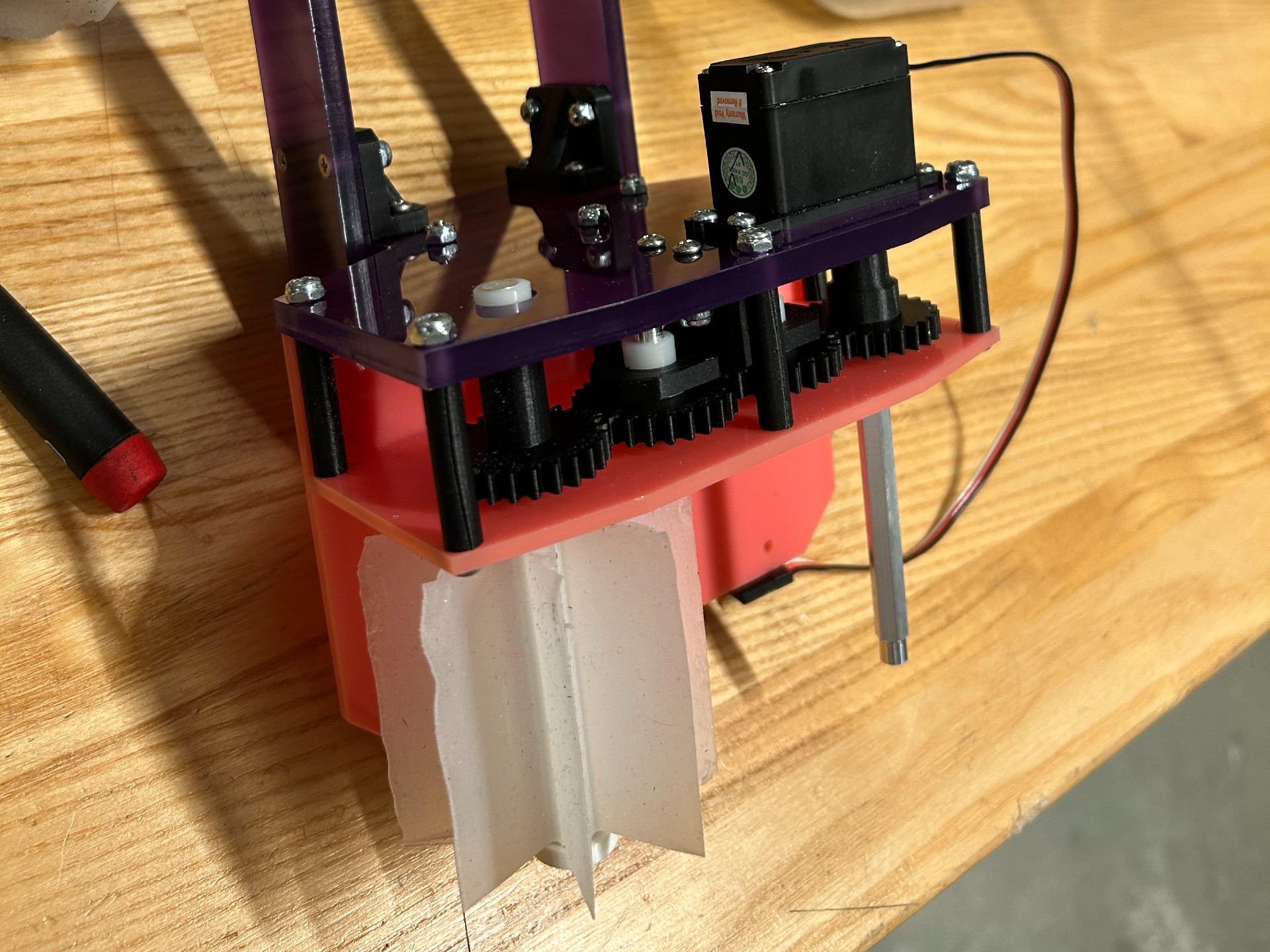
Elevator Actuation
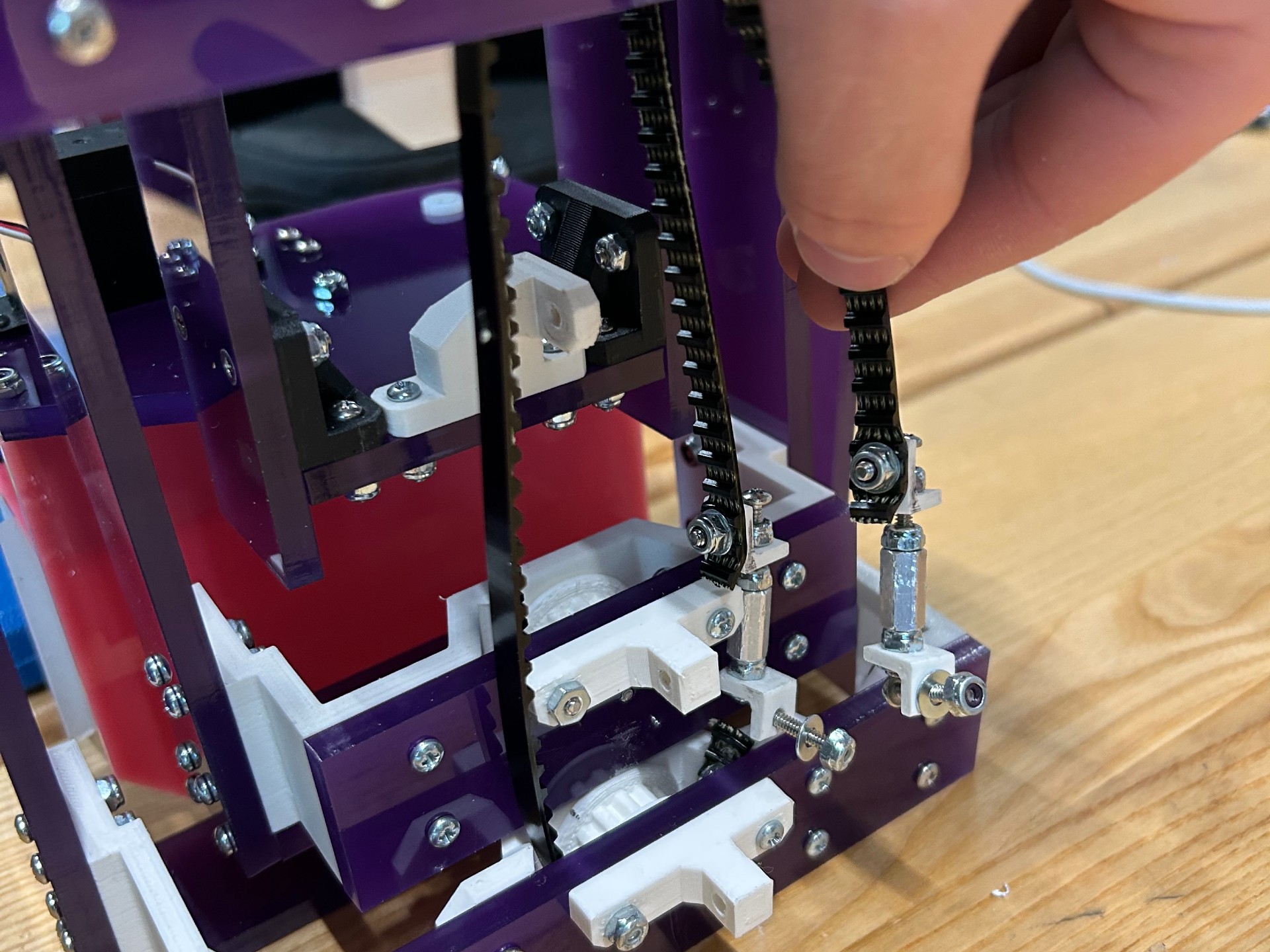
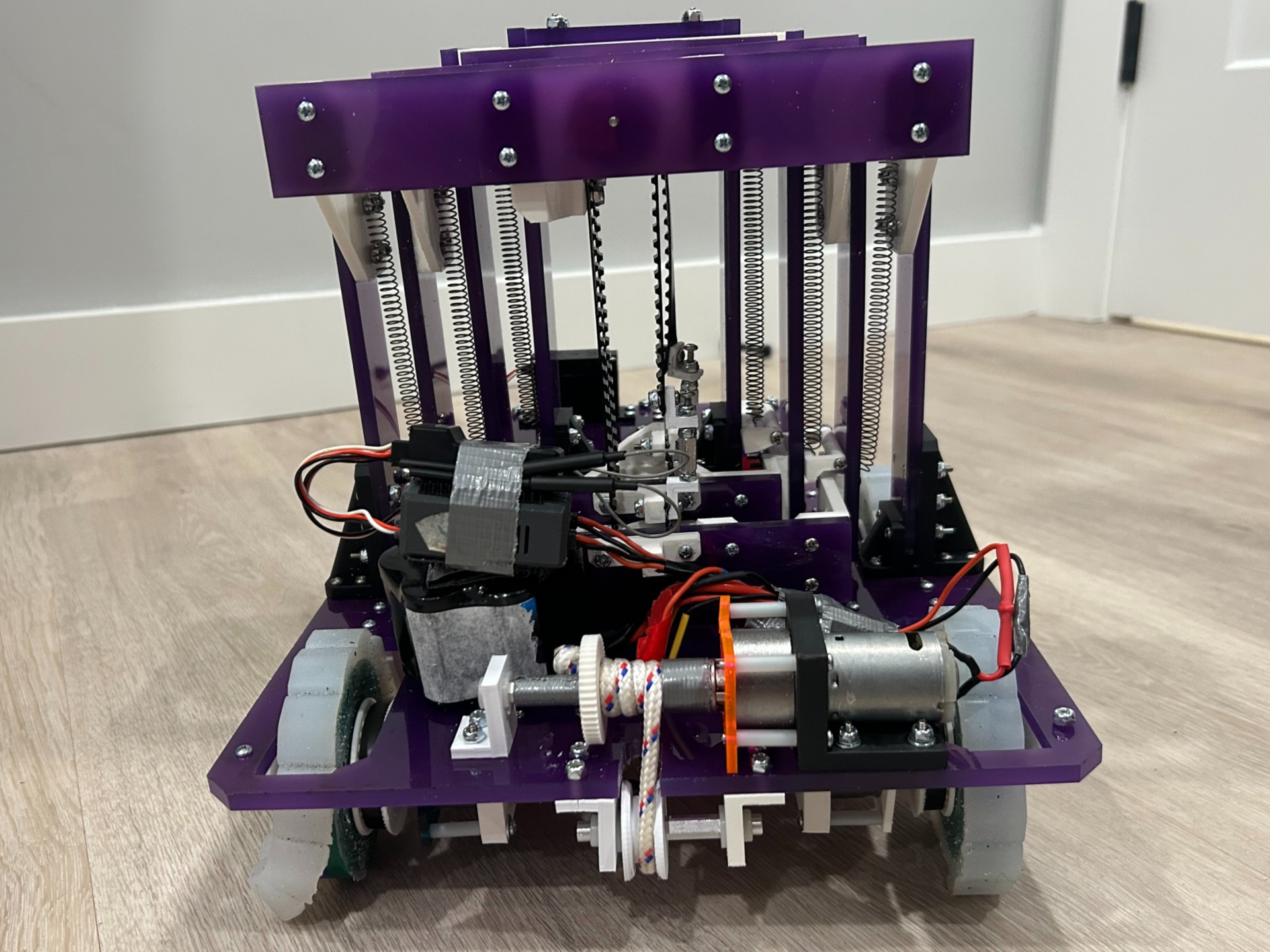
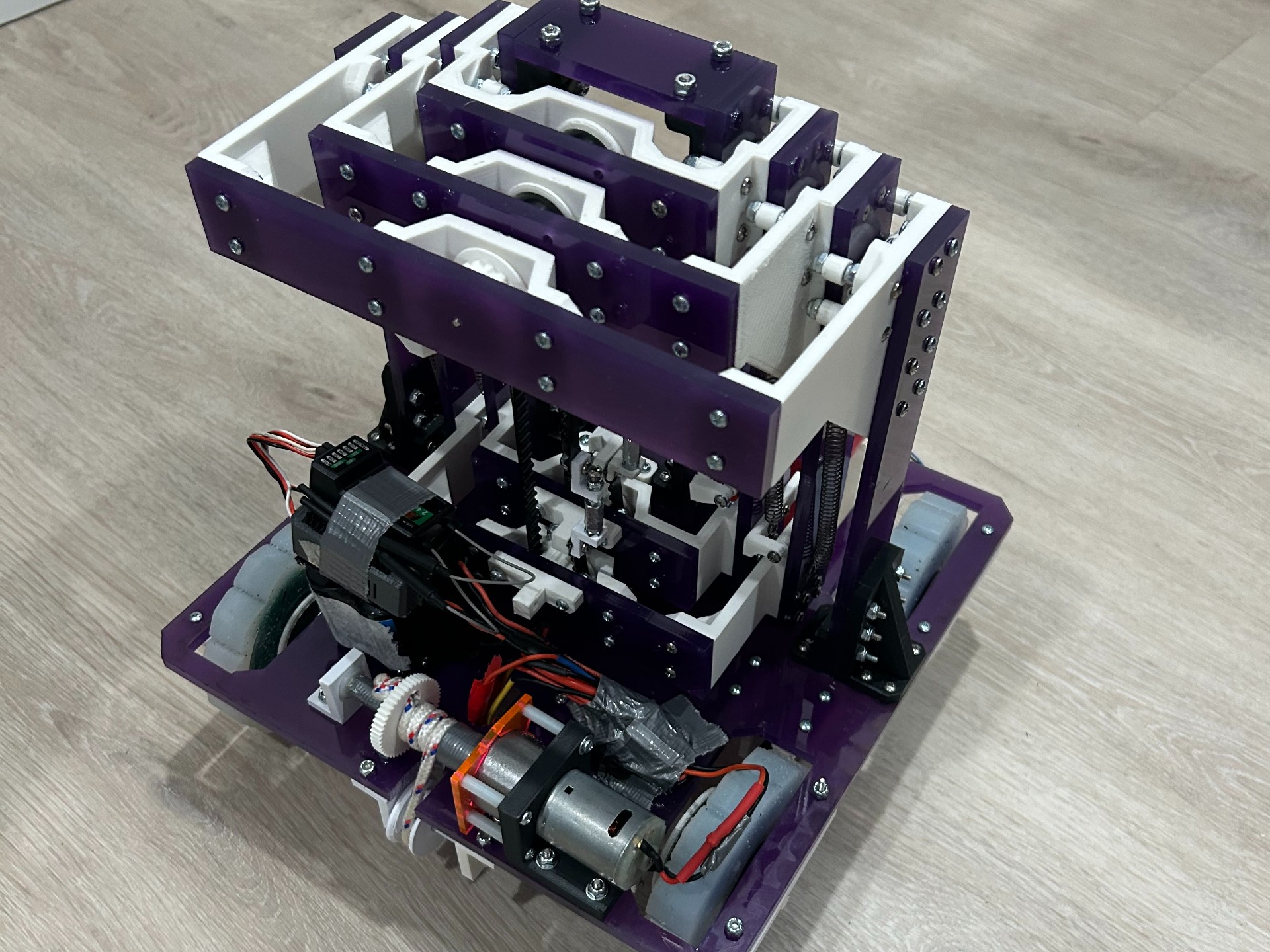
Finally the elevator. The elevator for our robot was designed with the purpose of using a belt driven multi-stage system. Belts were situated on pulleys individually tensioned with a custom inline solution for each stage. Stage belts were linked to subsequent stages and continuous actuation allowed the elevator system to lift.

Below is a copy of a presentation my team submitted for one of our earlier design reviews, which gives a sense of what we spent the most time iterating on for the robot:
When competition came around we didn’t perform nearly as well as we would have liked. One of our drive motors died the day of, and the elevator mechanism was heavy enough that it struggled to actuate reliably more than once. There wasn’t much we could have changed in time given the constraints, but I was still happy with what my team was able to do. Even though we underperformed in competition, we won Best CAD out of all the teams. The pictures below are from competition day:
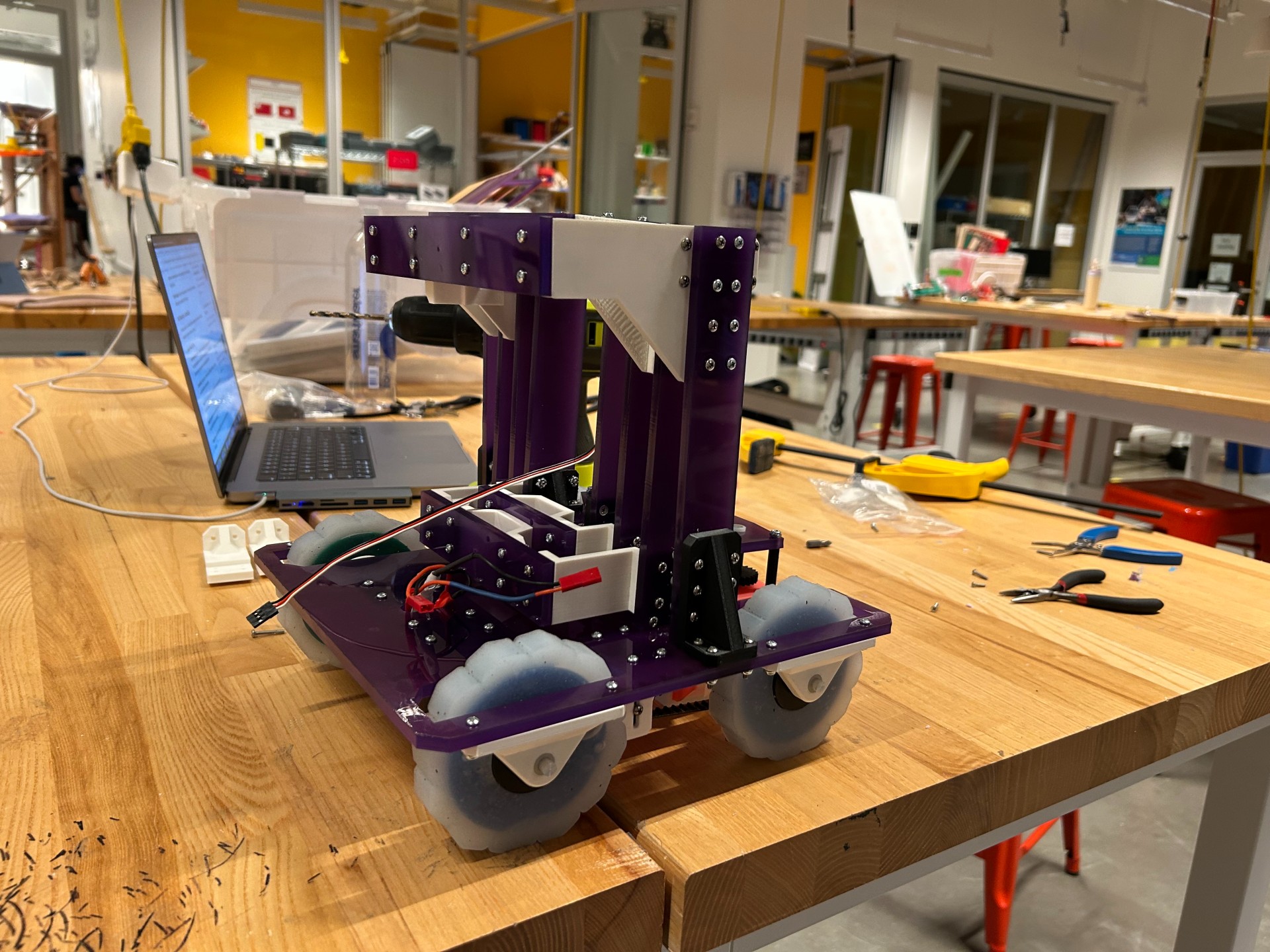
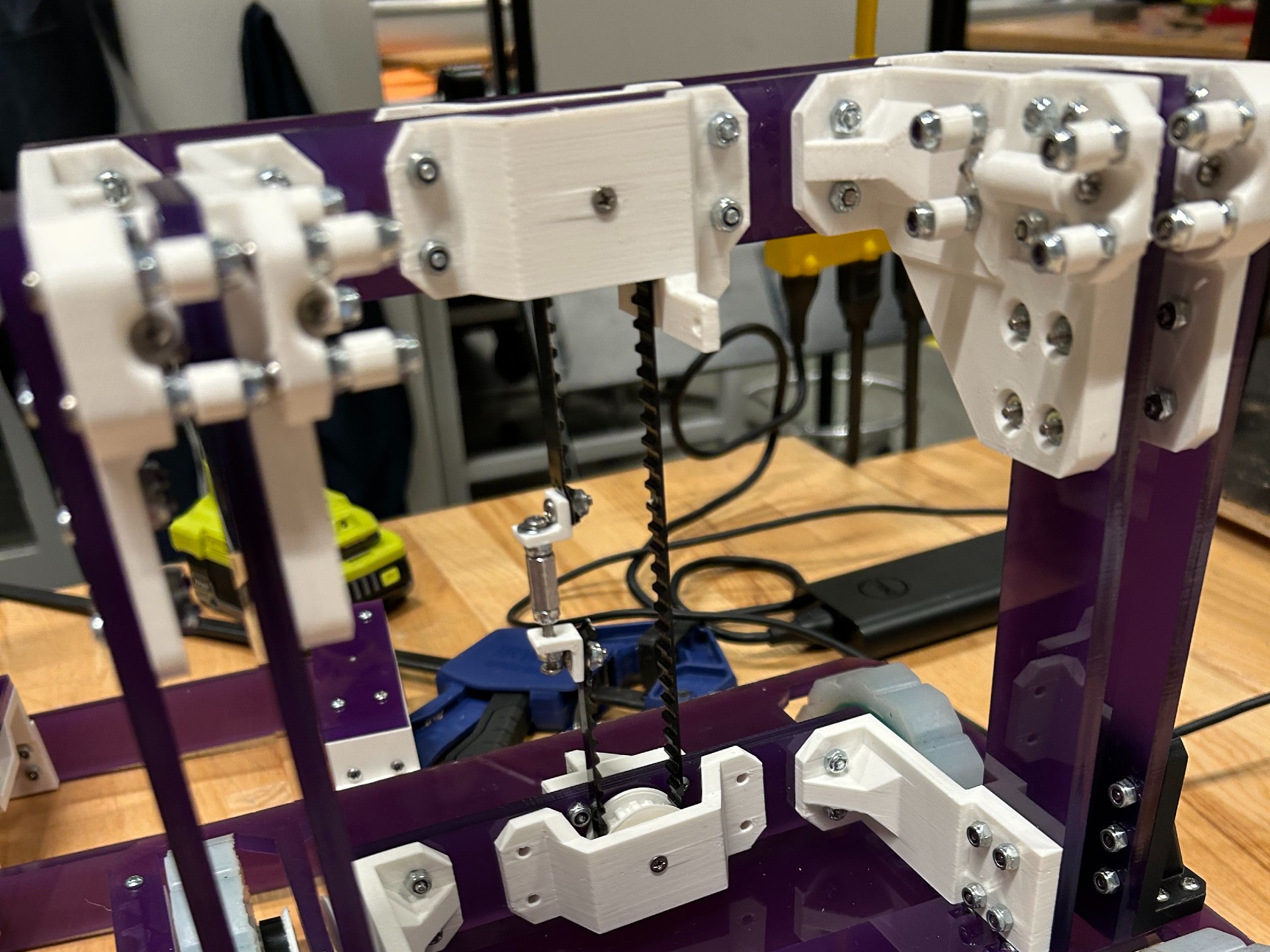
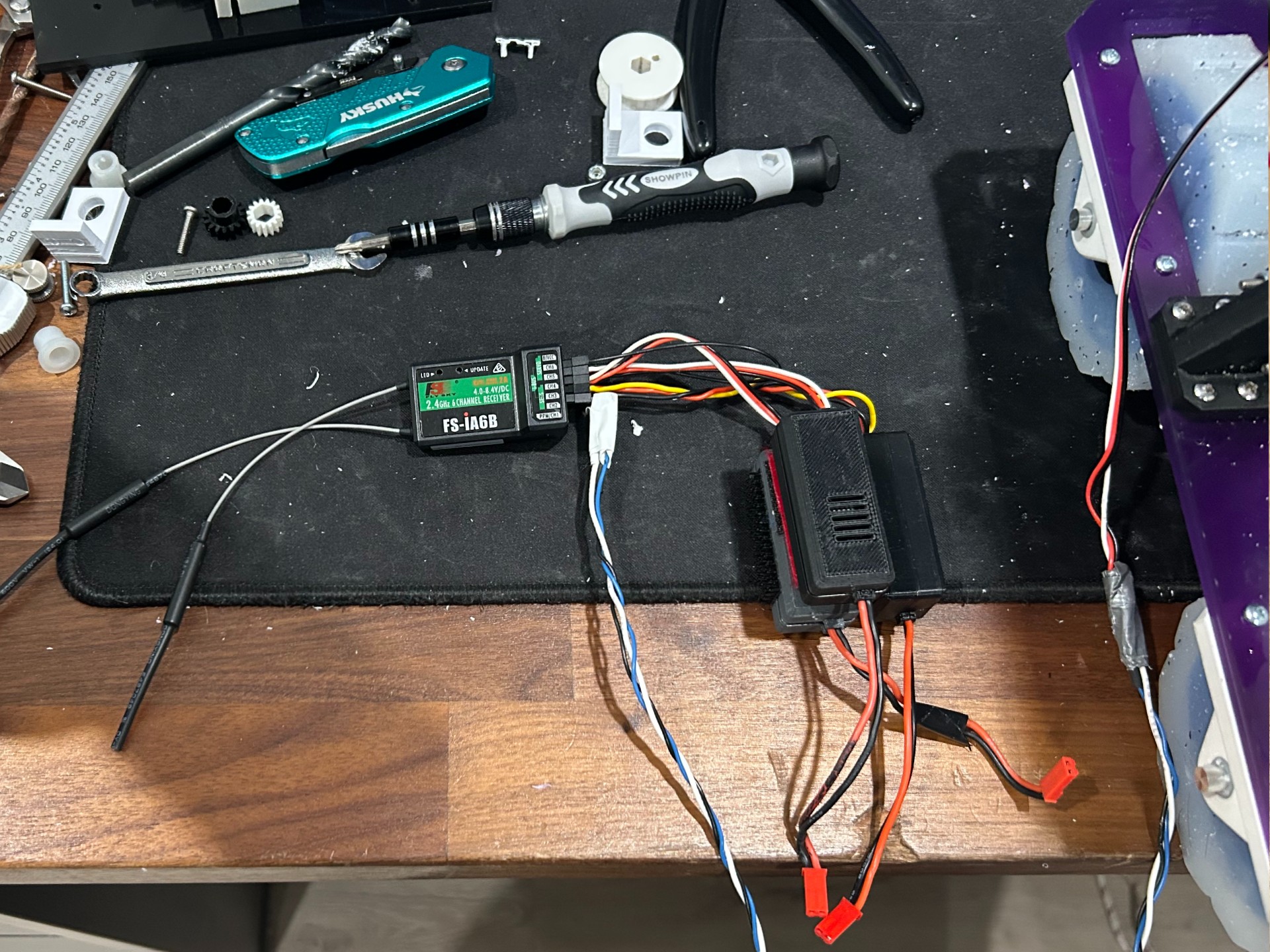
After competition we were allowed to take our robots home with us, so I took my team’s robot over break to try and make the elevator actuation more reliable. A last-minute change before competition was adding springs to each stage to reduce the gravitational force we needed to overcome, but it interfered with the belt system, so I tuned the spring locations and strengths to accommodate this. With the springs carrying more of the lift load, I was able to ditch the belt-only actuation method and switch to a winch with a nylon cord routed under the robot to retract the elevator, allowing stronger springs to handle extension. Below are some images I took while working post-comp at home.
Overall I enjoyed the class and the experience — especially my Turf Wars team “Sigma 6” who helped throughout the way: Samantha Villarreal, Evan Elling, Nicholas Bondar, & Lillie Tyrrell.