Chess Robot Gantry
Description:
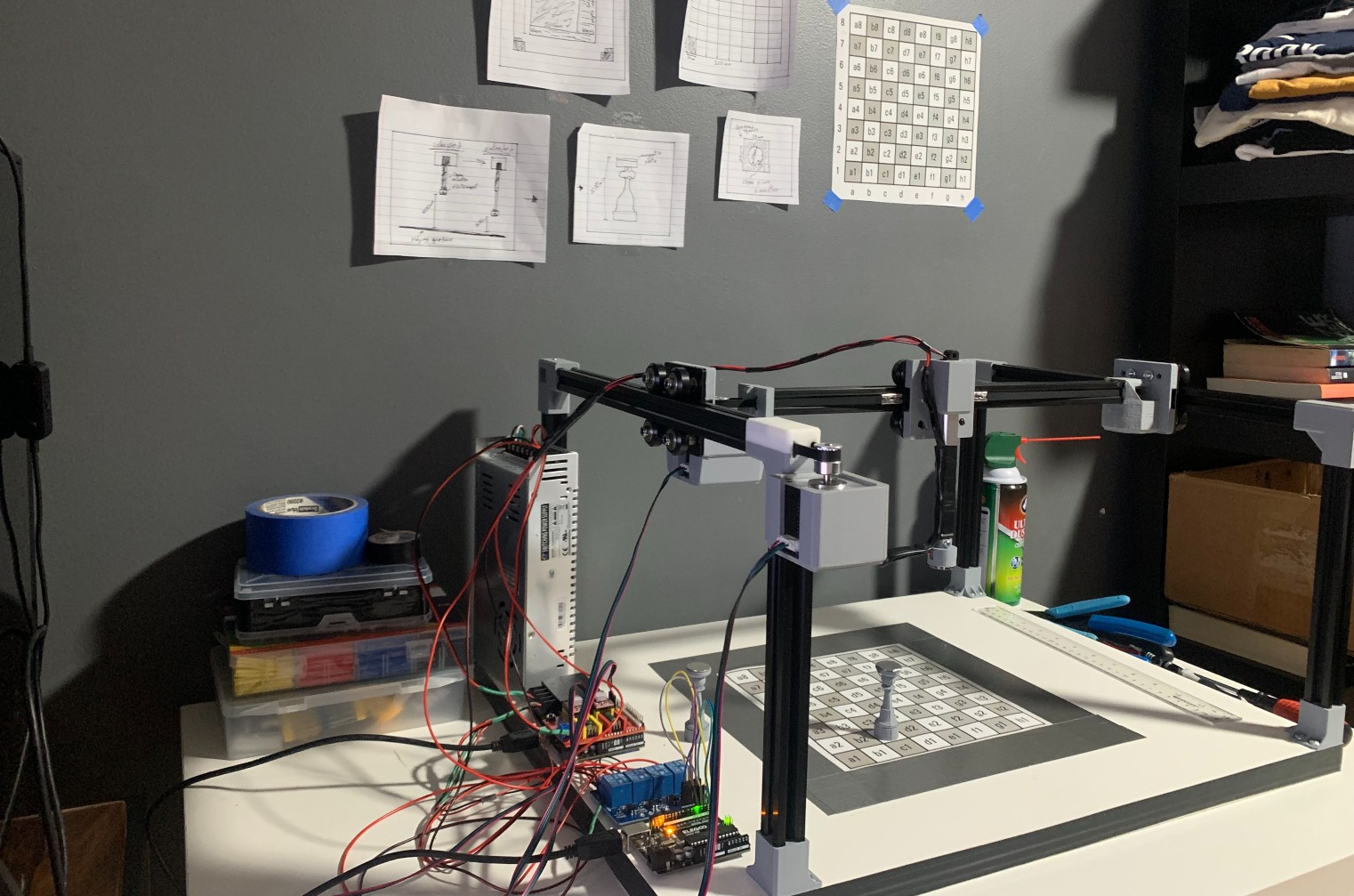
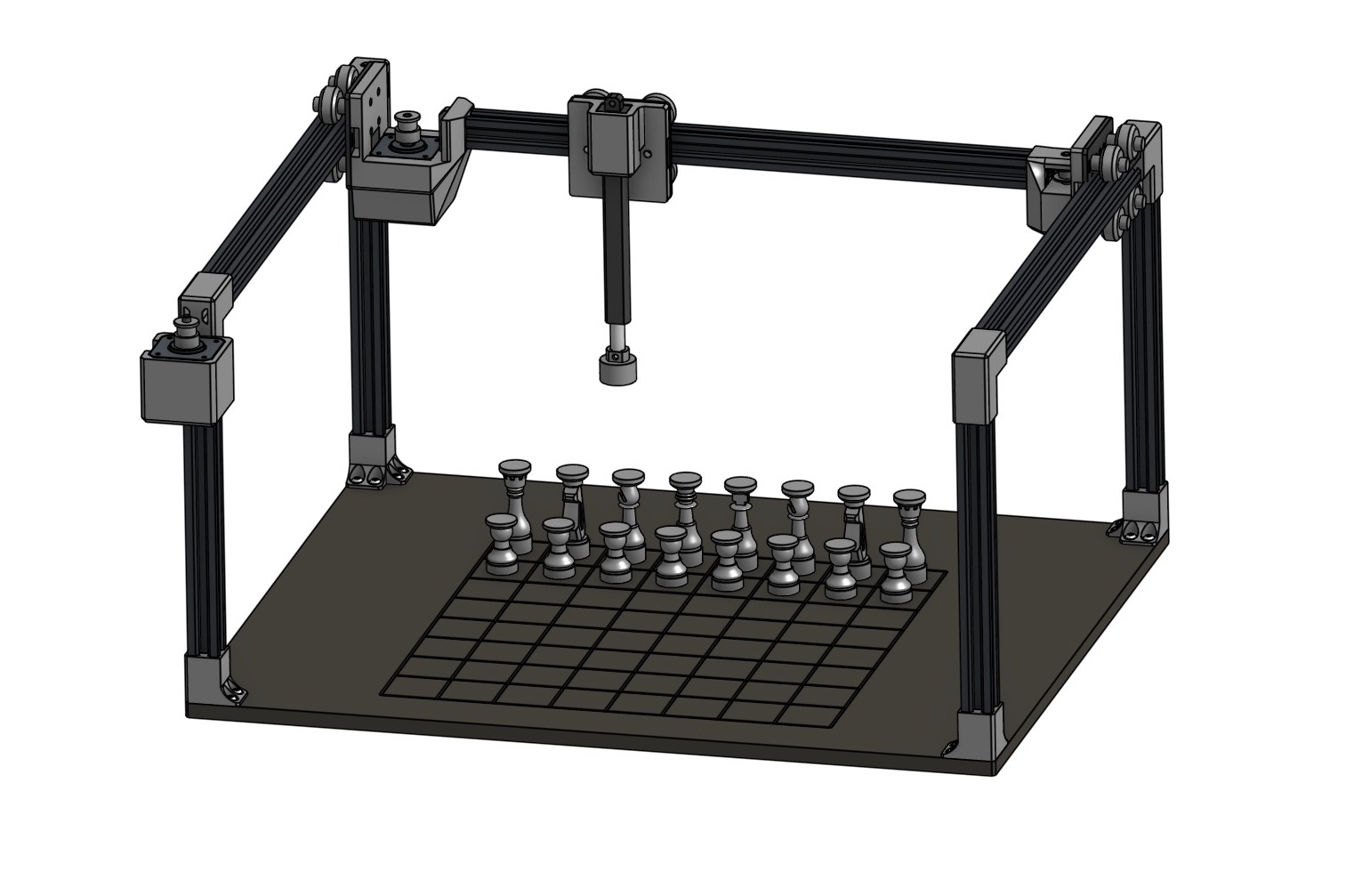
This project is a custom-built XY gantry system designed to physically execute chess moves on a standard board. Motion is driven by NEMA 17 stepper motors along linear rails using belt transmission, with position control handled through a microcontroller based system. The piece end-effector consists of an electromagnet mounted to a micro linear actuator, allowing pickup/release of 3d printed pieces topped with ferromagnetic disks. The gantry is built from aluminum T-slot extrusion. The full CAD assembly is shown above — see the video overview below for a walkthrough of the build, control implementation, and testing.